Automotive/통신
CAN 통신
날아라용팔이
2025. 2. 19. 10:53
반응형
Controller Area Network(CAN)은 높은 신뢰성, 오류 처리 및 우선순위 기반 메시징으로 인해 자동차, 로봇, 모빌리티, 산업 및 의료 등 다양한 분야에서 널리 사용된다.
1. 차량에서 CAN을 사용하는 이유
- 배선 복잡성 감소: 여러 ECU가 동일한 통신 버스를 공유할 수 있다.
- 실시간 통신 지원: 우선순위가 높은 메시지가 먼저 전송된다.
- 오류 감지 및 내결함성: CRC 기반 오류 검사 및 자동 재전송.
- 표준화된 프로토콜: 모든 자동차에서 사용(ISO 11898-1).
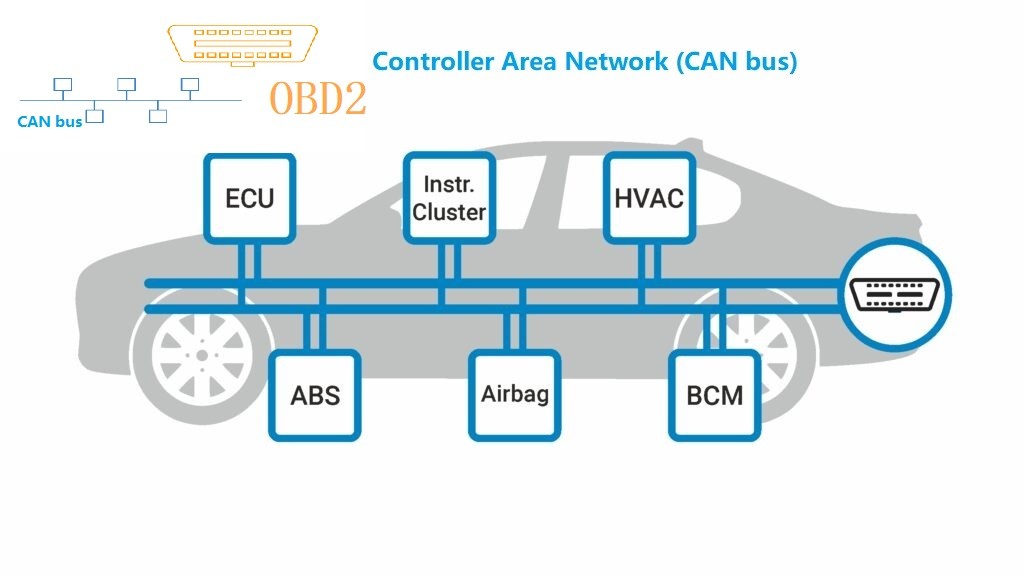
2. CAN 버스 기본 사항
- 작동 방식:
- 모든 ECU(엔진, ABS, 에어백, 전동 창문 등)는 단일 또는 여러 CAN 버스에 연결된다.
- 데이터는 우선순위를 결정하는 ID가 있는 프레임(메시지) 형태로 전송됩니다. ID가 낮을 수록 우선순위가 높다.
- 모든 ECU는 데이터를 전송하거나 수신할 수 있습니다(peer to peer network).
- 버스는 데이터 전송을 위해 Twisted pair 전선(CAN_H 및 CAN_L)을 사용한다.
- 물리적 계층:
- CAN_High 및 CAN_Low은 노이즈 내성을 위해 차동 신호를 형성한다.
- 신호 반사를 방지하기 위해 양쪽 끝에 120Ω 종단 저항을 사용 한다.
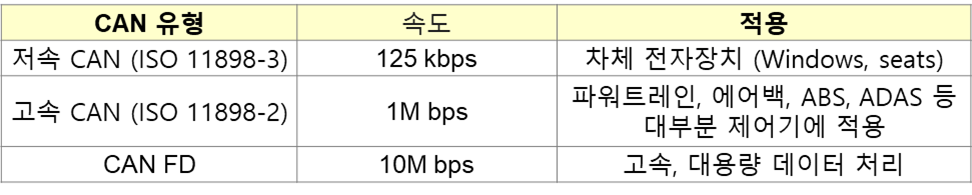
3. CAN 프로토콜 변형
4. CAN 프레임 구조
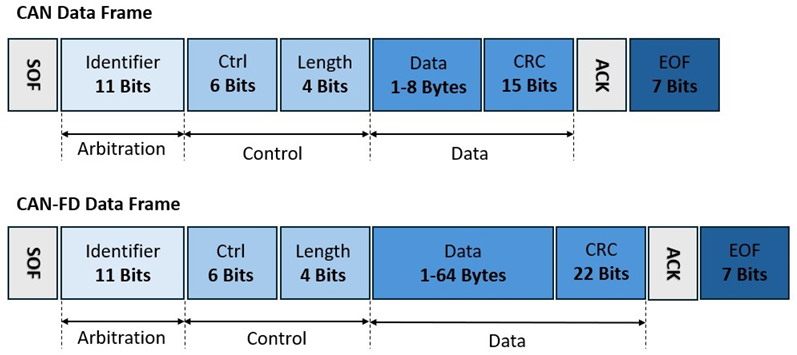
- SOF(Start of Frame): 메시지의 시작을 표시
- Identifier(ID): 메시지 우선순위를 정의(낮은 ID = 높은 우선순위)
- Control field: 데이터 길이를 지정
- Data field: 데이터 길이를 지정 (CAN 2.0에서는 0~8바이트, CAN FD에서는 최대 64바이트)
- CRC(Cyclic Redundancy Check): 데이터 무결성을 보장
- ACK(Acknowledgment): 수신이 성공했음을 확인
- EOF(End of Frame): 메시지 완료를 표시
5. CAN의 장단점
- 장점
- 높은 신뢰성: 내장된 오류 감지 및 오류 처리.
- 실시간 성능: 중요한 메시지의 우선순위를 지정 가능
- 배선 감소: 데이터 처리를 위한 많은 와이어를 2가닥의 통신선으로 구현 가능하여 배선을 감소하고 차량 무게와 복잡성 감소.
- 단점:
- 제한된 속도: CAN2.0의 경우 실제 500kbs로 통신하는 경우가 많으며 이는 자동차 이더넷에 비해 현저히 느림.
- 제한된 데이터 크기: CAN 2.0의 경우 8바이트로 제한되어 대용량 데이터의 경우 메시지 분할이 필요함.
6. CAN 통신의 미래
- CAN FD(Flexible Data-Rate): 기존 CAN보다 빠르고 효율적
- 차량 이더넷과의 통합: 이더넷은 고속 데이터를 처리하는 반면 CAN은 제어 신호로 유지
- 사이버 보안 강화: 암호화 및 방화벽으로 해킹으로부터 보호
※ 참고자료
http://esd.cs.ucr.edu/webres/can20.pdf 보쉬 CAN 2.0B 스펙
반응형