날아라용팔이
2025. 3. 23. 00:42
반응형
BLDC 모터 제어 방법
브러시리스 DC(BLDC) 모터는 브러시가 없고 기계적 접촉 대신 전자 제어 정류에 의존하기 때문에 속도, 토크 및 방향을 조절하기 위해 제어기가 필요하다. BLDC 모터에는 응용 프로그램 및 성능 요구 사항에 따라 여러 가지 제어 방법이 사용된다.
1. 정류 유형에 따른 제어 방법
- 6 Step communitation(사다리꼴 제어): 6단계(120°) a,b,c상 스위칭을 사용하여 고정자 권선에 전원을 공급한다. 회전자의 위치 피드백을 위해 홀 센서가 필요하다. 홀 센서 또는 센서리스 제어를 통하여 역기전력을 감지하고 회전자의 위치를 확인한다. 매 60° 마다 위상을 전환한다. MOSFET/IGBT 기반 인버터로 제어한다.
- 간단하고 널리 사용됨
- 중간~고속에서 효율이 좋음
- 저속에서 토크 리플이 더 높음
- 130° - 170° 사다리꼴 정류: 더 나은 토크 성능을 위해 조정된 사다리꼴 정류를 의미한다. 표준 6 setp communitation은 120도마다 전환되지만 전도 시간을 수정하면(예: 130°-170°) 토크 전달을 원활하게 할 수 있다. 완전한 사인파 제어 없이 토크 리플을 줄여야 하는 어플리케이션에 도움이 된다.
- 장점: 6 step communitation 대비 토크 리플을 줄일 수 있다.
- 단점: FOC보다 효율이 떨어진다.
- FOC 제어(Field Orientation Control, 사인파 제어): 벡터 제어 알고리즘을 사용하여 토크와 자속을 독립적으로 제어한다. 로터 위치를 확인하기 위해서 홀/인코더 센서 또는 센서리스 제어를 사용한다. EV traction 모터, 로봇 및 산업용 애플리케이션에서 일반적입니다. 구현: Clark 및 Park 변환을 사용하여 3상 전류를 회전 기준 프레임으로 변환한다. D축과 q축 전류를 개별적으로 제어한다. 원활한 사인파 출력을 위해 PWM 변조를 사용합니다.
- 원활한 작동 및 더 높은 효율
- 저속에서 더 나은 토크 제어
- 더 복잡한 제어 알고리즘
- DTC (Direct Torque Control): FOC와 같이 전류를 제어하는 대신 모터 토크 및 flux를 제어하는 방법으로 FOC 대비 빠른 응답 특성을 가지나 덜 부드러운 제어 방법이며, FOC와 같은 좌표 변환(coordinate transformation)이 필요하지 않다.
- 장점: 빠른 응답, 정밀한 모터 파라메터 불필요, 고 토크 제어 정확도 향상
- 단점: 6 step 대비 더 복잡함, FOC 대비 토크 리플이 높음

2. 피드백 유형에 따른 제어 방법
- 센서 기반 BLDC 제어(홀 효과 센서): 위치 피드백을 위해 홀 효과 센서 또는 회전 인코더 사용하며, 정밀한 위치 지정이 필요한 어플리케이션(예: 서보 모터, 로봇, CNC 기계)에 이상적임
- 장점: 정확한 위치 피드백, 저속 및 시동 시 안정적
- 단점: 추가 하드웨어(센서) 필요
- 센서리스 BLDC 제어(역기전력 감지):물리적 센서 대신 모터의 상이 바뀌는 역기전력 전압의 제로 프로싱 지점을 감지하여 모터의 위치를 판단하며, 역기전력 감지가 용이하나 중속-고속에서 잘 작동한다. 드론 등 비용에 민감한 어플리케이션에서 일반적으로 사용함
- 장점: 낮은 비용 및 감소된 하드웨어, 더 안정적(센서 오류 없음)
- 단점: 시동 성능이 좋지 않음(저속에서 어려움), 고속에서는 센싱 주기가 짧아져서 고성능의 마이크로프로세서가 필요
3. 속도 제어 기술
- Open Loop 제어(고정 듀티 사이클): 고정 PWM 듀티 사이클을 사용하여 모터 속도를 설정한다.
- 장점: 구현이 간단하고 비용이 저렴함
- 단점: 다양한 부하에 대응하는 속도 조절이 불가능하다.
- Closed Loop 제어 (PI 속도 제어): 속도 피드백(인코더/홀 센서에서)을 사용하여 모터 PWM 제어 신호를 조절한다. 이 때 목표 속도와 실제 속도차이를 이용하여 PWM Duty를 변경하는 PI 제어를 이용하여 목표 속도를 유지한다. EV 모터, 산업 자동화 및 로봇 공항에서 일반적으로 이용한다.
- 장점: 정밀한 속도 조절이 가능하고, 부하 변동을 보상한다.
- 단점: PID 매개변수 조정이 필요하다.
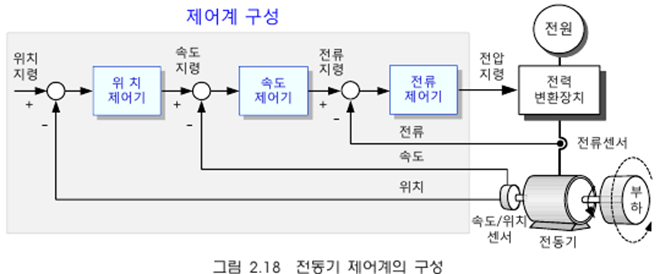
- 위치 및 전류 제어 (예, MDPS): 위치 센서, 전류 센서 필요하며, 내부 전류 루프로 전기자 전류와 토크 제어가 가능하여 동적 응답 특성이 개선됨
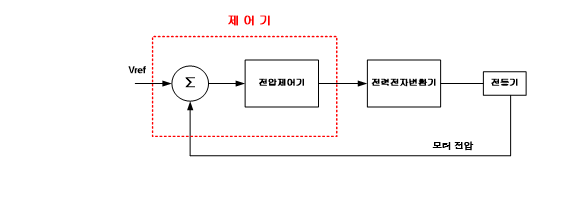
- 전압 (속도) 제어 (예, 블로워 FET 제어): 속도 센서 없고 전류센서는 모터 스톨 검출용으로 사용됨
- Advance Angle Control (진각 제어): BLDC(Brushless DC) 또는 PMSM(Permanent Magnet Synchronous Motor)에서 전류의 인가 시점을 앞당겨(진각, advance angle) 모터의 성능을 향상시키는 기법이다. 특히 고속 회전 시 역기전력(Back-EMF)이 증가하면서 전류가 늦게 흐르는 문제를 해결하기 위해 사용된다. BLDC/PMSM가 빠르게 회전할수록 코일에 유도된 역기전력(Back-EMF)이 증가하며.역기전력이 너무 크면 전류가 지연되면서 토크(Torque) 손실이 발생한다. 진각제어(Advance Angle Control)는 적용전류를 기존보다 조금 더 앞선 시점에 인가하여 전류와 역기전력의 위상차를 줄임으로써, 결과적으로 고속 영역에서 더 높은 효율과 출력을 유지 가능하다.
- 진각 제어의 효과
- 역기전력 보상으로 높은 속도에서 효율 향상
- 전류 위상 지연을 보상하여 출력 토크 증가
- 전류와 역기전력 위상 정렬로 손실이 감소되어 모터 발열 감소
- 전력 효율 최적화에 의한 소비 전력 절감으로 배터리 수명 연장
- 고정 진각 제어 (Fixed Advance Angle Control): 일정한 고속 회전이 필요한 시스템 (예, 팬, 펌프)에 적용 가능
- 장점: 설정이 간단하고 구현이 쉬움
- 단점: 모터 속도 변화에 따라 최적화가 어렵고 효율이 떨어질 수 있음. 속도 변화에 따라서 최적의 진각을 찾기가 어려움
- 속도 기반 진각 제어 (Speed-Based Advance Angle Control): 모터 속도에 따라 진각을 동적으로 조절하며 속도가 증가할수록 진각을 더 크게 조절하여 전류 지연을 보상
- 장점: 속도에 따라서 자동으로 진각을 조절하여 효율 향상
- 단점: 속도 센서, 복잡한 알고리즘 필요
- 전류 기반 진각 제어 (Current-Based Advance Angle Control): 모터의 부하 및 전류 변화를 측정하여 진각을 조절하여 부하에 따라서 토크 출력을 최적화
- 장점: 부하에 따라서 최적의 진각을 적용 가능
- 단점: 실시간 연산이 필요하며 고성능의 MCU가 필요
- 진각 제어의 효과
4. PWM 변조 기술
- PWM을 사용한 블록 정류: PWM을 사용하여 전압을 변조하는 간단한 ON/OFF 제어.팬, 펌프 및 기본 모션 제어에서 일반적이다.
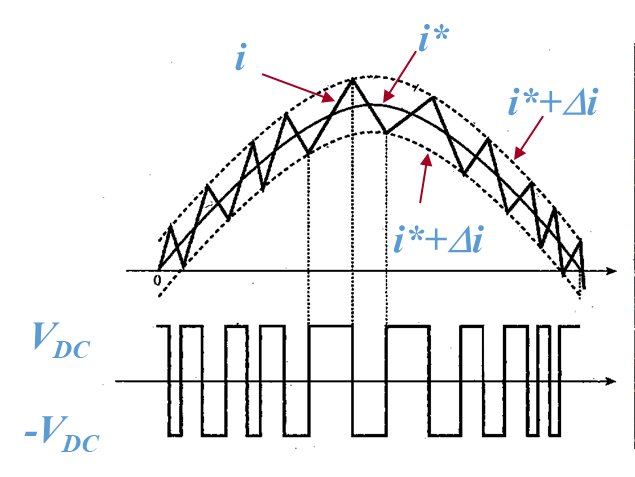
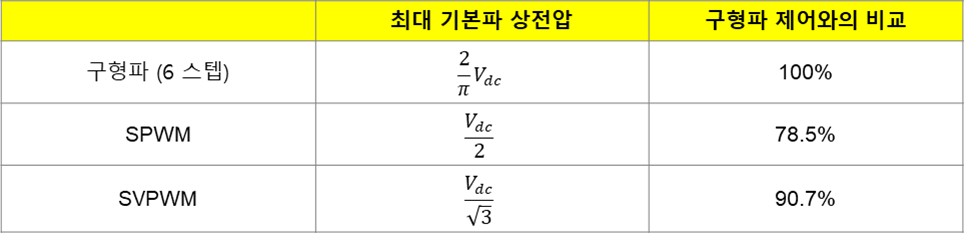
- Sinusodial PWM(SPWM): 정현파의 지령 전압 Vref를 높은 주파수의 삼각 반송파 (Triangular Carrier Wave) Vc와 실시간으로 비교하여 인버터 각 상 스위치의 온/오프 상태를 결정한다.
- 공간 벡터 PWM(SVPWM): 3상 전압 지령을 복소수 공간에서 하나의 공간 벡터로 표현하여 이를 변조하는 기법이다. 이 방식은 SPWM 기법보다 15.5% 더 큰 기본파 전압을 선형적으로 생성할 수 있으며, 이 기법으로 변조된 전압을 전동기에 인가한 경우 전류와 토크에 포함된 고조파가 다른 기법보다 적다는 장점으로 인해 많이 사용되고 잇다. 더 높은 효율을 위해 DC 버스 활용을 극대화합니다.EV 인버터, 고성능 모터 및 산업용 애플리케이션에서 사용
5. 제어 방법 선택
- 단순한 애플리케이션(팬, 펌프): PWM을 사용한 6 step commutation.
- 정밀 제어(EV, 로봇) 및 고성능 모터: Closed Loop PI제어를 이용하는 FOC.
- 비용에 민감한 어플리케이션: 센서리스 역기전력 제어
※ 참고자료
1. 모터제어
2. Rohm 기술자료 https://techweb.rohm.co.kr/downloads/
반응형