-
1. 모터 제어 하드웨어 구성 (Hardware Setup)Motor Control/ST MCSDK 6.4.1 2025. 8. 12. 05:27반응형
우선 Motor Control Workbench를 설치해야 한다. 아래 ST 사이트에가서 ver 6.4.1을 설치한다. https://www.st.com/en/embedded-software/x-cube-mcsdk.html
X-CUBE-MCSDK | Product - STMicroelectronics
STM32 microcontrollers offer the performance of the industry-standard Arm® Cortex®-M cores.
www.st.com
Motor Control Workbench를 실행하게 되면, 아래와 같은 화면이 나온다.
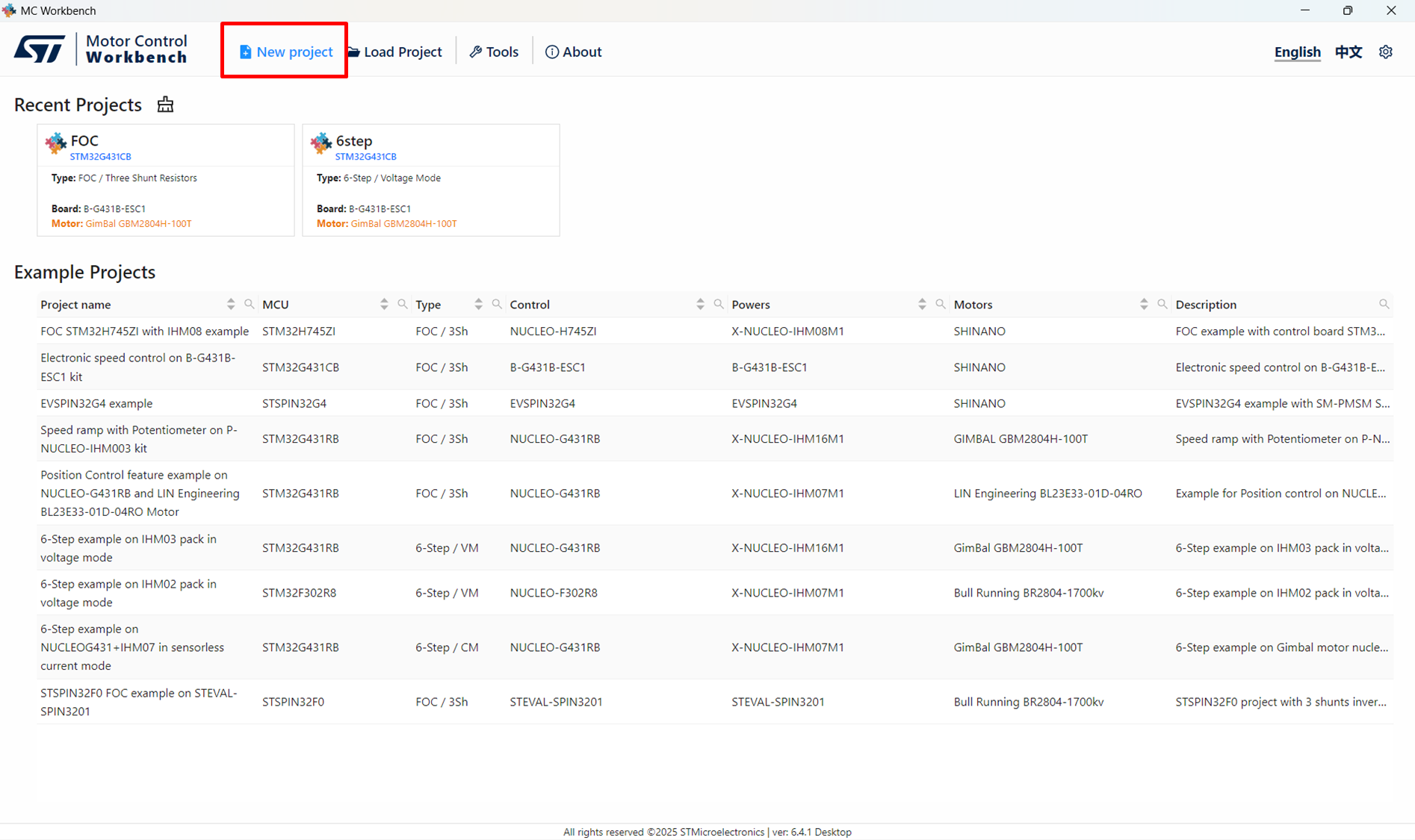
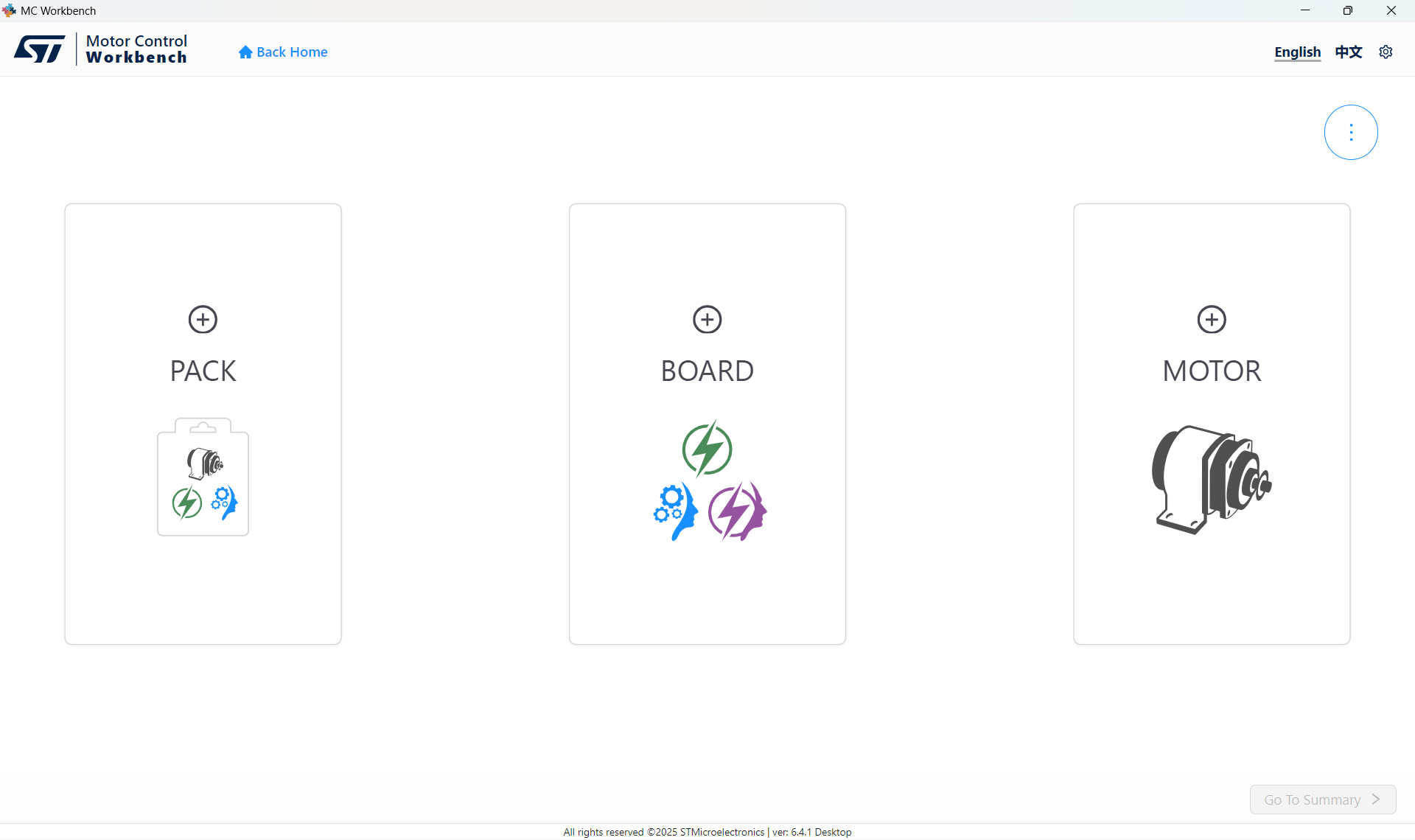
New project를 클릭하면 아래와 같은 화면이 나온다. 실험에서는 PACK을 이용하지 않고, B-G431B-ESC1 보드와 MAD 5005 280KV 모터를 사용하였다.
테스트는 B-G431B-ESC1 보드와 MAD 5005 280KV, 그리고 코드가 센서리스로 구성되어 있어서 사용하지 않지만 AS5600 magnetic angle sensor가 사용되었다.
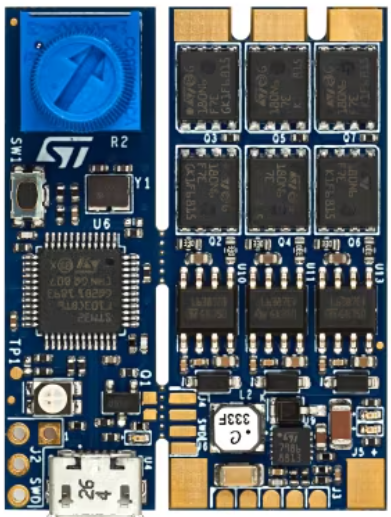
B-G431B-ESC1 
Mad 5005 280KV 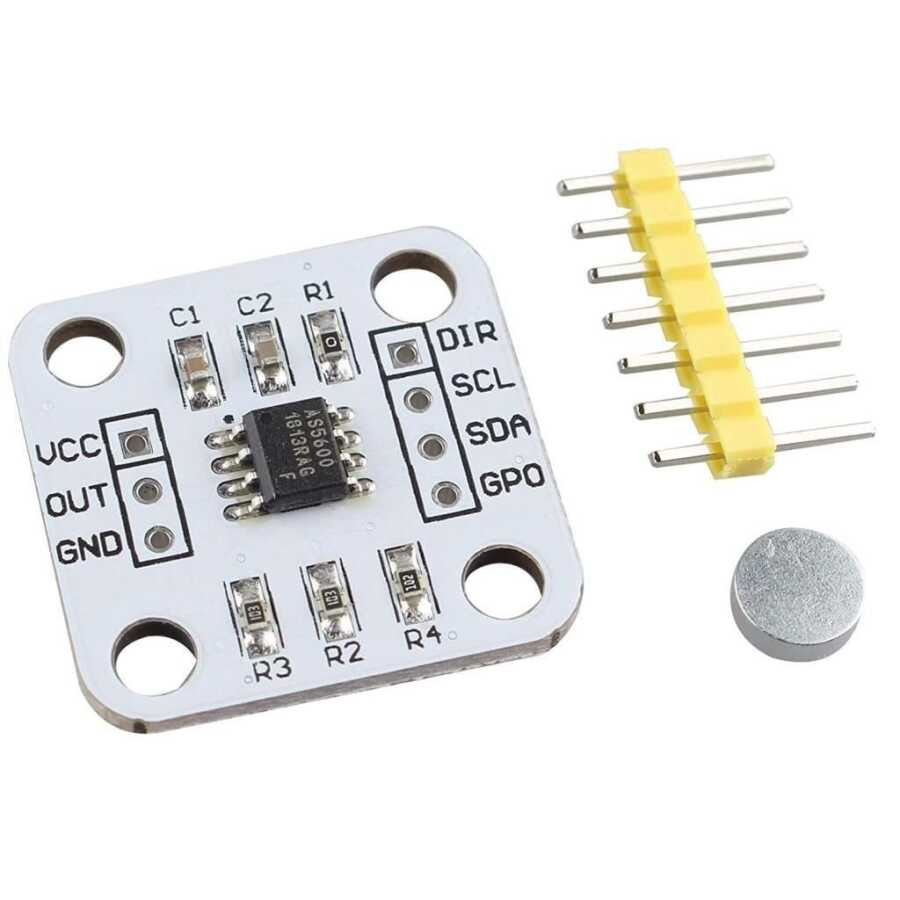
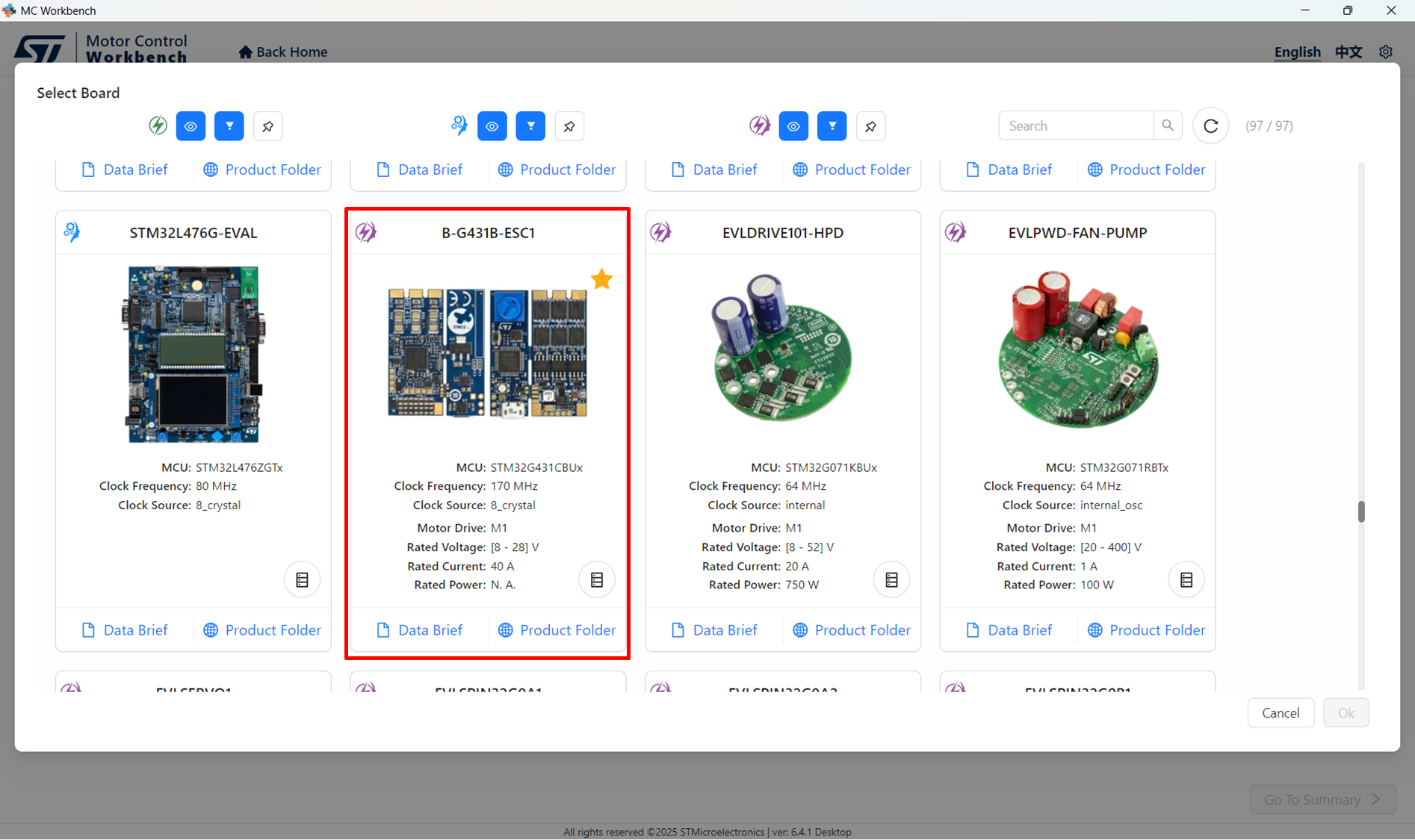
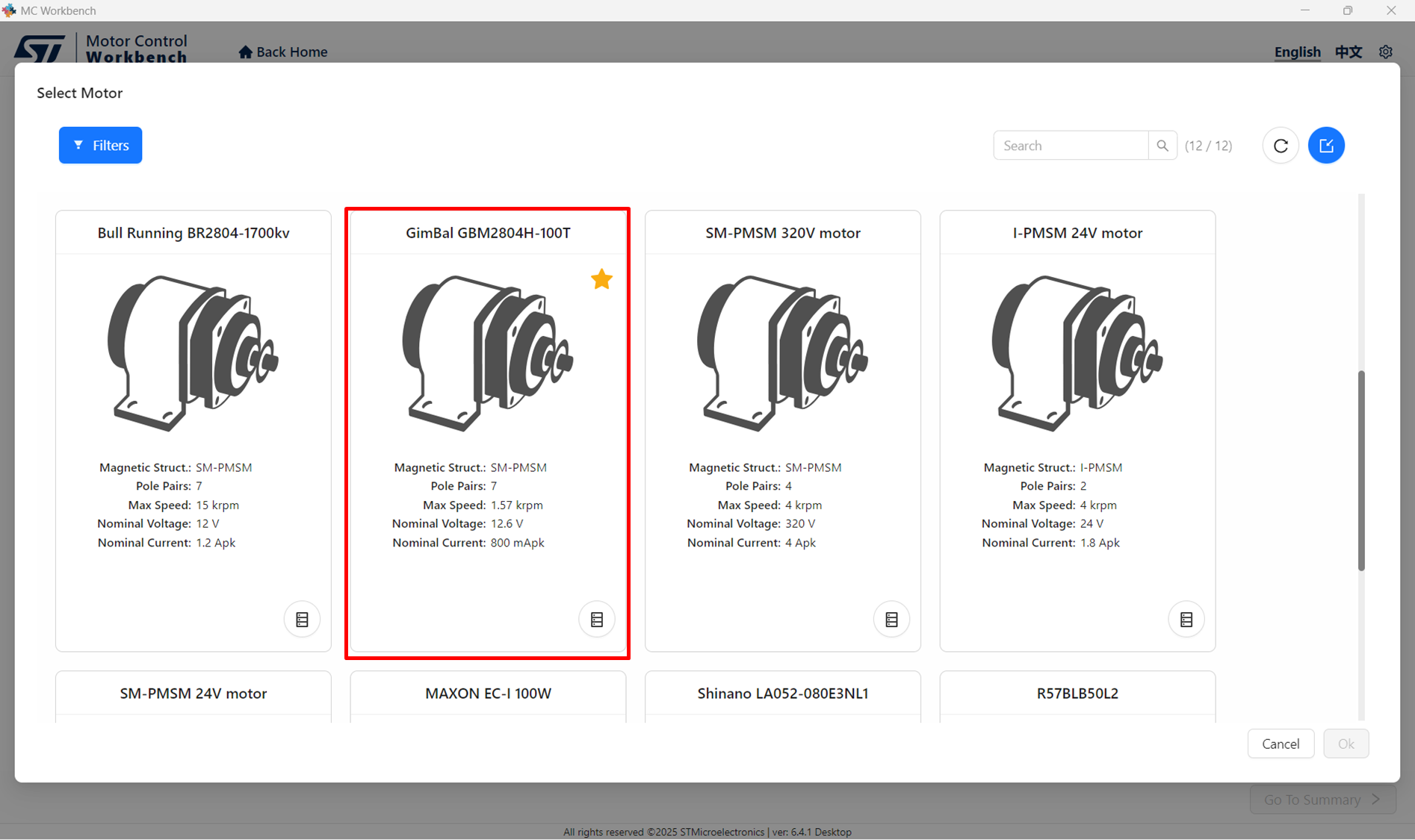
AS5600 Board에서 B-G431B-ESC1을 선택하고, 모터는 입력 전압과 최대 rpm이 그나마 유사한 Gimbal GBM2804H-100T를 선택하였다. MC Workbench에 MAD 5005 모터가 없기 떄문에 주요 파라메터에 대해서 수정을 해주어야 한다.
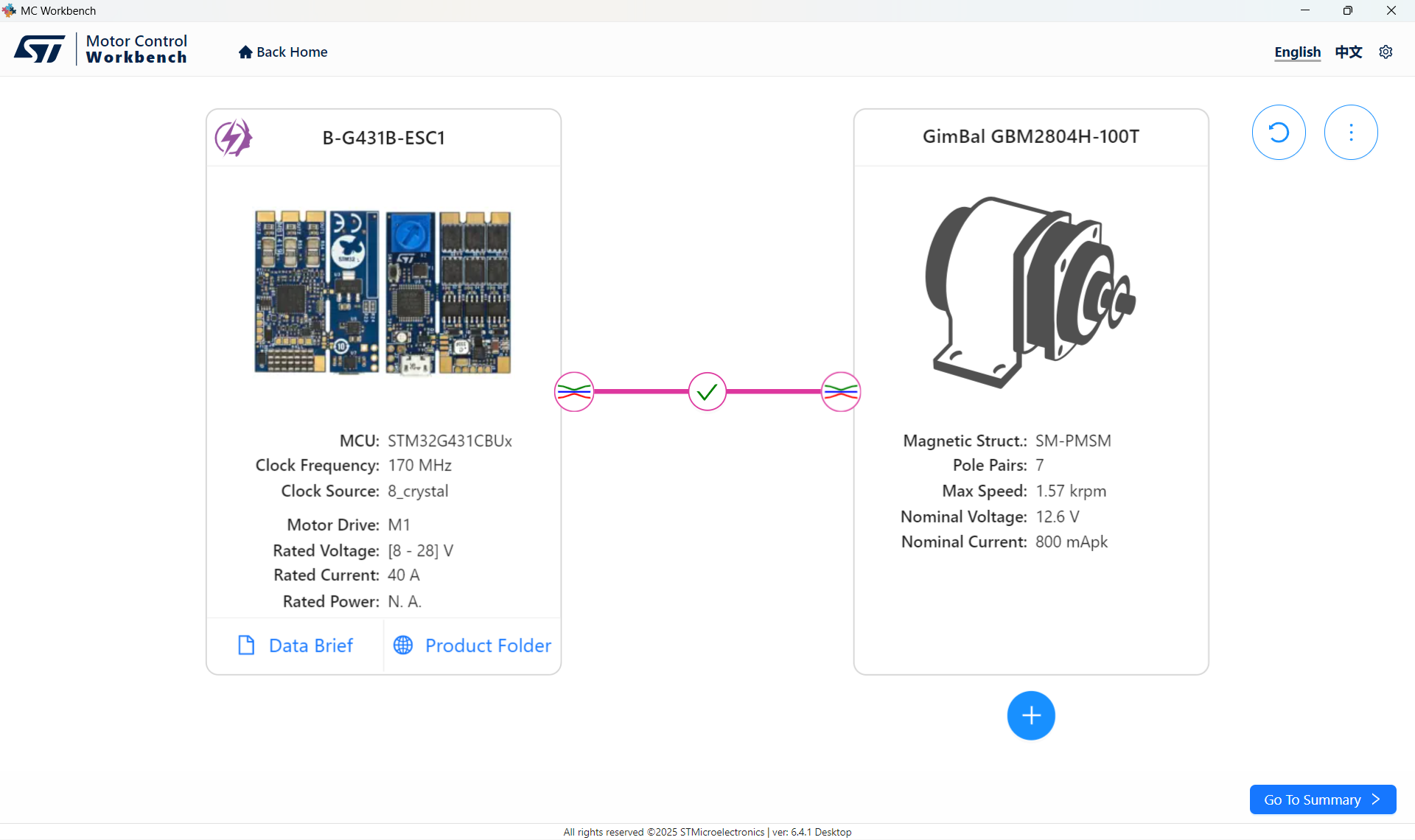
제어보드와 모터를 선택하면 아래와 같은 그림이 나온다.
FOC를 생성할 것인지 6-Step 제어를 생성할 것인지 결정한 다음에 아래에 있는 Create 버튼을 클릭한다.
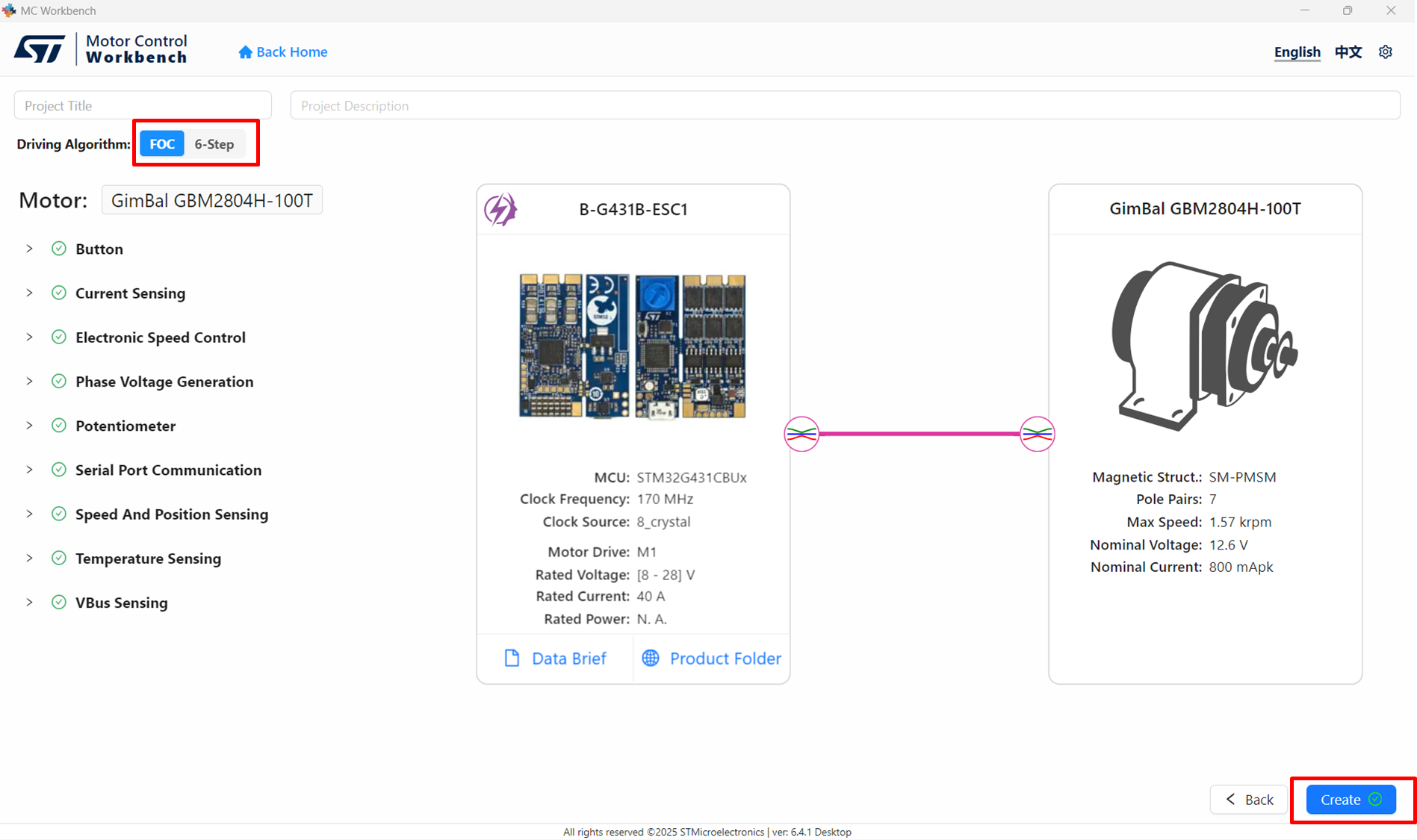
Create를 하면 아래와 같은 화면이 나온다. 여기에서 주요 파라메터를 변경이 가능하다. 다음 Chapter 2에서 측정 또는 데이터시트에서 찾은 데이터를 이용해서 모터 파라메터를 Chapter 3에서 변경해준다.
 반응형
반응형'Motor Control > ST MCSDK 6.4.1' 카테고리의 다른 글
3. 시스템 구성 (System Configuration with MC Workbench) (0) 2025.08.12 2. 모터 특성 파라메터 (Motor Characterization) (1) 2025.08.12 0. ST MCSDK 6.4.1 (4) 2025.08.11 6스텝 BLDC 제어를 위한 PWM 발생 (1) 2021.11.15 상태 LED ON/Off (0) 2021.11.15