-
라이다 센서Automotive/Radar (레이더 센서) 2020. 3. 9. 17:38반응형
1. LiDAR이란 무엇입니까?
LiDAR은 전자 부품이며 센서 제품군의 일부입니다. 보다 정확하게는 ToF (Time Of Flight) 센서 범주의 일부입니다. 센서는 온도, 습도, 빛, 무게, 거리 등과 같은 물리적 매개 변수에 대한 데이터를 수집합니다. LiDAR은 통신 프로토콜을 통해 가장 가까운 장애물까지의 거리를 측정합니다.
LiDAR 약어는 Light Detection and Ranging을 의미합니다. 이것은 센서로부터 장애물이 얼마나 멀리 있는지를 결정할 수있는 계산 방법입니다. LiDAR는 탐지 분석 및 추적 목적으로 레이저 빔을 사용합니다.2. LiDAR는 어떻게 작동합니까?
LiDAR 기술은 자체와 대상 간의 거리를 측정하는 원격 감지 기술입니다. 빛은 LiDAR에서 방출되어 대상으로 이동합니다. 표면에서 반사되어 다시 소스로 돌아옵니다. 빛의 속도는 일정한 값(299,792,58 m/s)이므로 LiDAR은 대상까지의 거리를 계산할 수 있습니다.
거리 = (빛의 속도 x 비행 시간) / 2
Lidar Physics Principles
센서의 위치와 방향을 알면 반사면의 XYZ 좌표를 점으로 표시 할 수 있습니다.
이 과정을 여러 번 반복함으로써 계측기는 LiDAR가 수집 한 모든 지점으로 구성된 복잡한 '지도'를 구축합니다.
다음 다이어그램은 표면에서 파도가 굴절되는 방식을 설명합니다.
Optical wave refraction 3. LiDAR 사양에 대한 통찰력
3.1 스캐닝 기술
응용 분야에 따라 LiDAR은 단일 지점 및 촬영 거리 측정이거나 스캔 회전 모드에서 실행되도록 구축 될 수 있습니다.
스캐닝 모드에서 LiDAR은 맥동 주파수에 따라 연속적인 값을 계산합니다.
스캐닝 LiDAR는 일반적으로 1Hz와 100Hz 사이의 회전 주파수를 기반으로 최대 360 °의 각도 범위에서 거리를 회전하고 측정합니다.
3.2 LiDAR 비전 시스템
LiDAR 비전 시스템에는 1D, 2D 또는 3D의 3 가지 범주가 있습니다. 그들은 같은 방식으로 작동합니다. 차이점은 point and shoot 또는 스캐닝 모드 시스템 사용과 레이저 빔의 양에 관한 것입니다.
1D 레이저 스캐너의 경우 장애물과 스캐너 사이의 거리를 측정 할 수있는 스틸 레이저 빔이 필요합니다.2D LiDAR의 경우 하나의 레이저 빔만 필요합니다. 실제로, 그것은 스핀 이동을 기반으로 펄스하고 X와 Y 축에 대한 데이터를 얻기 위해 대상까지의 수평 거리를 수집합니다.
3D LiDAR의 경우 아이디어는 동일하지만 X 축, Y 축 및 Z 축에 대한 데이터를 얻기 위해 수직 도끼에 흩어져있는 여러 개의 레이저 빔이 촬영됩니다. 각 레이저 빔은 다른 빔과 각도 델타를 갖습니다.


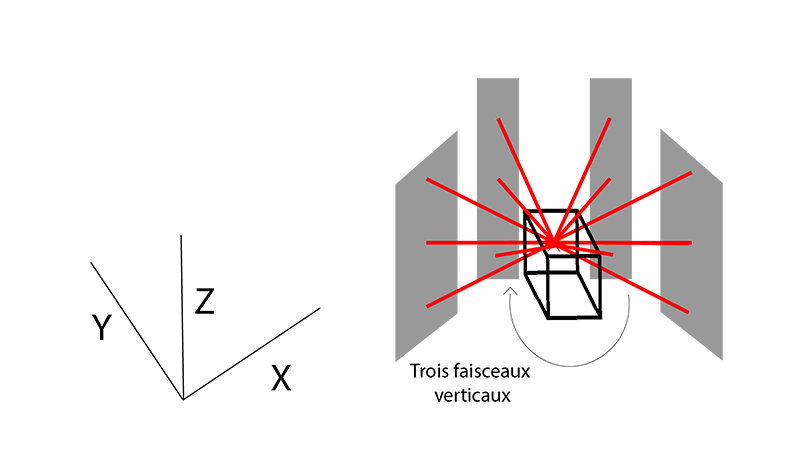
1D, 2D, 3D Lidar schematic 3.3 Wavelength
레이저의 파장은 LiDAR의 중요한 매개 변수입니다. 실제로 지구 표면에받는 햇빛은 넓은 파장 스펙트럼에 걸쳐 퍼져 있습니다.레벨 1보다 강력한 레이저 빔은 사람의 눈에 해로울 수 있고 망막을 손상시킬 수 있습니다.
LiDAR는 다음 파장을 사용합니다.
기상 / 도플러 LiDAR 용 적외선 (1500 –2000 nm) – 과학적 용도
지상파 매핑을위한 근적외선 (850-940 nm)
수심 측정법을위한 청 적색 (500 – 750 nm)
기상학을위한 자외선 (250nm)Infrared (1500 –2000 nm) for meteorology/Doppler LiDAR – Scientific uses
Near-infrared (850 -940 nm) for terrestrial mapping
Blue-red (500 –750 nm) for bathymetry
Ultraviolet (250 nm) for meteorology이 중에 차량에서는 905nm와 1550nm를 주로 사용한다.
3.4 실내 실외
이 기술 표준을 준수하는 모든 LiDAR을 실내에서 사용할 수 있습니다. 그중 몇 개만 실외에서 사용할 수 있습니다. 다음과 같은 요소를 고려해야합니다.
파장 : 500nm에서 햇빛이 가장 높은 수준의 방해
주변 광 저항 (Lux) : 제대로 작동하기 위해 허용 할 수있는 빛의 양을 나타내는 매개 변수
표면 유형 : 투명 표면, 연기, 안개 등
환경 소음 저항 능력 : 비, 눈, 구호 등
온도 범위 : LiDAR의 작동 온도
전자기 고려 사항 : 센서 동작을 변경할 수있는 물리 방해
실외 LiDAR는 성능이 우수하여 더 비쌉니다.
3.5 거리
LiDAR 거리 범위는 0.01m ~ 200m입니다. 환경에 따라 LiDAR은 실내, 실외, 거친 환경 등에 노출됩니다. 적절한 거리 범위를 가진 LiDAR을 선택해야합니다.3.6 Error
모든 LiDAR에는 두 가지 유형의 에러가 발생합니다.
Systematic error :이 유형의 오류는 모든 측정을 체계적이고 예측 가능한 방식으로 이동시킵니다. 체계적인 오류는 제거 할 수 없지만 그 영향을 최소화 할 수 있습니다.
Statistical error : 환경 및 물리 매개 변수 (굴절, 회절 등)로 인한 추가 오류도 발생할 수 있습니다. LiDAR에 의해 수행 된 것과 정확히 동일한 측정 값이 다른 값을 표시 할 때 통계 오류가 발생합니다.
LiDAR 범위 거리 오차는 ± 10mm에서 ± 200mm 사이에서 변경됩니다.
3.7 전원
모든 LiDAR에는 일종의 전원 공급 장치가 필요합니다. 전압 및 전류 소비에 따라 전력 소비를 계산할 수 있습니다. 배터리를 사용하는 경우이 매개 변수는 실제로 중요합니다. 실제로 많은 전력을 소비하는 LiDAR는 배터리주기를 단축시킨다.3.8 성능
3.8.1 각도 범위 (angular range)
이 기술 사양은 LiDAR 회전 범위를 나타냅니다.
예를 들어, 각도 범위가 360 ° 인 LiDAR는 작동 중 전체 회전 (완전 원)을 수행 할 수 있습니다. 이 매개 변수가 360 °보다 작 으면 LiDAR는 주변의 일부 (파이 조각과 같은)에서만 측정합니다.
모바일 로봇의 경우 모든 환경을 매핑해야하므로 360 ° 각도 범위 LiDAR이 유용합니다.
3.8.2 Step
3.8.3 각도 분해능 (angular resolution)
각도 분해능은 이전 계산 (0.35 °)의 결과이며, 방사 범위가 방사 범위에서 얼마나 정확한지 나타냅니다. 이 숫자가 작을수록 생성 된 '지도'의 품질이 높아집니다. 로봇이 이동하기 위해서는 환경이 얼마나 정확한지 알아야이 매개 변수를 선택해야합니다.
3.8.4 스캔 주파수 (scan frequency)
이 선형 매개 변수는 LiDAR 모터의 회전 속도를 나타냅니다. 스캐닝 빈도는 LiDAR가 1 초 동안 얼마나 많은 회전을 할 수 있는지 보여줍니다.Scanning frequency Angular speed Rotational speed 1Hz 360° / s 60 rpm (tr/min) 예를 들어, 스캔 주파수가 10Hz이고 각도 범위가 360 ° 인 LiDAR은 초당 10 회 회전합니다.
로봇이 환경에서 빠르게 움직이거나 환경이 로봇 주위에서 빠르게 움직일 때이 매개 변수를 선택해야합니다. 실제로, 아무도 정보 누락 정보를 결정하는 것을 좋아하지 않습니다.
3.8.5 스캔 시간
이 파라미터는 다음과 같습니다. 스캔 시간 = 1 스캔 주파수 = x 초 / 스캔.
3.8.6 samples
samples는 측정 된 포인트 수입니다.
예 : 1024 샘플 / 스캔은 하나의 레이저 빔을 가진 LiDAR이 한 스캔 사이클에서 1024 포인트 또는 샘플을 갖음을 의미합니다.
3.8.7 샘플 주파수
1 초 동안의 샘플 수입니다.
예를 들어, 하나의 레이저 빔과 10Hz에서 1024 단계의 LiDAR의 샘플 주파수는 1024 * 10 = 10240 샘플 / 초입니다.
두 설정 중 하나를 개선하여 1 초 동안 수신되는 데이터 양을 늘릴 수 있습니다.
Hypothetical example: LiDAR parameters schematic 3.8.8 FOV (Field of View)
고정형(Solid-State) 라이다와 레이더는 둘 다 뛰어난 수평 FOV(방위각)를 가지고 있지만, 360° 회전을 하는 기계식 라이다 시스템은 모든 ADAS(Advanced Driver Assistance Systems) 기술 중에서도 가장 넓은 FOV를 가지고 있다.
4. Interface
다량의 데이터 전송을 위해서 이더넷, CAN 통신이 사용된다.5. 구현 방식
5.1 MEMS 라이다: MEMS 라이다 시스템은 전압 같은 자극이 적용되면 기울기 각이 달라지는 작은 미러들을 사용한다. 사실상, 기계식 스캐닝 하드웨어를 전자기계식으로 대체한 것이 MEMS 시스템이다. MEMS 시스템의 경우, 수신 SNR을 결정하는 리시버 집광 조리개가 몇 mm로 일반적으로 매우 작다. 여러 가지 차원으로 레이저 빔을 이동시키려면 복수의 미러들을 연속으로 늘어놔야 한다. 이러한 정렬 프로세스는 평범하지 않지만 일단 설치하고 나면 움직이는 차량에서 쉽게 접하게 되는 충격과 진동에 취약하다. MEMS-기반 시스템의 또 다른 함정은 자동차의 사양이 -40°C에서 시작하는데, 이것이 MEMS 디바이스에는 까다로울 수 있다.
5.2 플래시 라이다: 플래시 라이다의 작동은 광학 플래시를 사용하는 표준 디지털 카메라와 매우 유사하다. 플래시 라이다, 한 개의 대면적 레이저 펄스가 전방 환경에 빛을 비추고 그 레이저에 가까이 위치한 광검출기의 초점면 어레이가 후방산란 광을 포착한다. 이 검출기는 이미지의 거리, 위치, 반사 강도를 포착한다. 이 방식은 기계식 레이저 스캐닝 방식에 비해 단 하나의 이미지로 전체 장면을 포착하고, 데이터 포착 속도가 훨씬 빠르다. 또한, 전체 이미지가 단 하나의 플래시에 포착되기 때문에, 이 방식은 이미지를 왜곡시킬 수 있는 진동 효과에 영향을 덜 받는다. 이 방식의 단점은 실생활 속에 존재하는 역반사체에 있다. 역반사체는 빛의 대부분을 반사시키고 아주 조금 후방 산란시켜, 사실상 전체 센서를 블라인드 시켜 이를 무용지물로 만든다. 이 방식의 또 다른 단점은 전체 장면에 빛을 비추어 충분히 먼 곳까지 보려면 매우 높은 피크 레이저 파워가 필요하다는 것이다.
5.3 OPA(Optical phase array): OPA의 원리는 위상 어레이 레이더와 유사하다. OPA 시스템에서는 광학 위상 모듈레이터가 렌즈를 통과하는 빛의 속도를 제어한다. 빛의 속도를 제어하면, [그림 2]처럼 광학 파면 형상을 제어할 수 있다. 상단의 빔은 지체되지 않지만, 중간과 아래의 빔은 양을 늘리면서 지체된다. 이 현상은 사실상 레이저 빔을 여러 방향으로 겨누도록 ‘조향’하는 것과 같다. 비슷한 방식들 역시 후방 산란된 빛을 그 센서로 조향함으로써 기계식 운동 부품들을 제거할 수 있다.
OPA (Optical Phase Array) 5.4 FMCW(Frequency-modulated continuous wave) 라이다: 지금까지의 방식들은 협광 펄스를 이용한 ToF에 기반한 것들이지만, FMCW는 가간섭성 방식을 이용해 짧은 처프의 주파수 변조 레이저 광을 만들어낸다. 되돌아온 처프의 위상과 주파수를 측정하면 시스템이 거리와 속도를 둘 다 측정할 수 있다. FMCW에서는 계산량과 광학이 훨씬 단순하다. 그렇지만 처프 생성으로 복잡함은 가중된다.
참고자료
https://www.generationrobots.com/blog/en/what-is-lidar-technology/
What is LiDAR technology?
This is the first of 4 blogposts about LiDARs. LiDAR technology is used inrobotics, autonomous cars or archaeological sites
www.generationrobots.com
https://www.epnc.co.kr/news/articleView.html?idxno=82099
라이다의 원리와 장단점, 구현 방식에 따른 종류 - 테크월드
[테크월드=양대규 기자] 자율주행차의 상용화가 가까워짐에 따라, 라이다(LIDAR) 기술도 빠르게 발전하고 있다. 차량용 라이다에 대해 그 개념과 이용 가능한 시스템의 유형까지 근본 원리에 대해 알아보자.라이...
www.epnc.co.kr
반응형